MRTech solutions for NVIDIA Jetson platform
Jetson is an advanced series of high-performance edge-computing modules from NVIDIA. This platform is designed to accelerate computing in smart machines and AI applications, enabling users to develop and deploy breakthrough products across multiple industries.
Each Jetson module carries a powerful system-on-chip (SoC) from NVIDIA, integrated with an ARM architecture CPU, and designed to be energy efficient and have a compact form factor. So, the architecture and functionality of modules like Jetson Orin or Xavier are ideal for using them together with the high-performance image processing IFF SDK offered by MRTech SK. The following benchmarks for Jetson Orin and descriptions of use cases with other Jetson modules confirm this very well.
Let’s remember that MRTech IFF SDK is a powerful cross-platform toolkit that facilitates the development of high-performance machine vision and image processing applications. The SDK pre-processes images received from the camera (or disc) and delivers them to the target application in the required format and in an impressively efficient manner.
To learn more about MRTech IFF SDK, please visit our company’s Github account, where documentation and the SDK sample applications are now available.






AGX Orin and Orin NX series
NVIDIA describes its Jetson Orin modules as the most powerful computers for energy-efficient autonomous vehicles and next-generation machine vision systems. The MRTech team verified this by benchmarking the performance of AGX Orin and Orin NX using the latest version of our IFF SDK and its most general sample application farsight.
The application enabled the following image processing pipeline:
- acquisition of 8/10/12-bit images (full frame or ROI) from XIMEA camera,
- color pre-processing on GPU including black level subtraction, histogram calculation, white balance, demosaicing (HQLI, L7, DFPD, MG algorithms at choice), color correction, gamma, and image format conversion,
- automatic control of exposure time and white balance,
- H.265 encoding and RTSP streaming over the network to a receiving computer.
Orin testing configuration
Image source: XIMEA CB120-CM-X8G3 camera
Transmitting computer: AGX Orin 32GB or Orin NX 16 GB that is emulated with AGX Orin devkit
- Jetpack 5.1.2 [L4T 35.4.1]
- IFF SDK v1.6, farsight sample application
Receiving computer: MSI Raider laptop with NVIDIA GPU
- Windows 11 OS
- MRTech DragonNest application to receive, decode, render on a screen

AGX Orin: Full HD image @ 8-bit
- Image processing pipeline:
– input image format RAW8
– color pre-processing with fast HQLI demosaic (5×5)
– auto-exposure and auto-white balance
– H.265 encoding with 44 Mbps bitrate
– RTSP streaming over network - Results:
– Full HD (1920×1080 ROI) image @ 8-bit @ 240 FPS
– processing latency on AGX Orin: 7 ms
– AGX Orin GPU avg. load: 30%
– full G2G latency: 25 ms
AGX Orin: Full HD image @ 12-bit
- Image processing pipeline:
– input image format RAW16
– color pre-processing with high-quality MG demosaic (23×23)
– auto-exposure and auto-white balance
– H.265 encoding with 44 Mbps bitrate
– RTSP streaming over network - Results:
– Full HD (1920×1080 ROI) image @ 12-bit @ 240 FPS
– processing latency on AGX Orin: 8 ms
– AGX Orin GPU avg. load: 48%
– full G2G latency: 30 ms
AGX Orin: 4K UHD image @ 8-bit
- Image processing pipeline:
– input image format RAW8
– color pre-processing with fast HQLI demosaic (5×5)
– auto-exposure and auto-white balance
– H.265 encoding with 45 Mbps bitrate
– RTSP streaming over network - Results:
– 4K UHD (3840×2160 ROI) image @ 8-bit @ 120 FPS
– processing latency on AGX Orin: 17 ms
– AGX Orin GPU avg. load: 32%
– full G2G latency: 45 ms
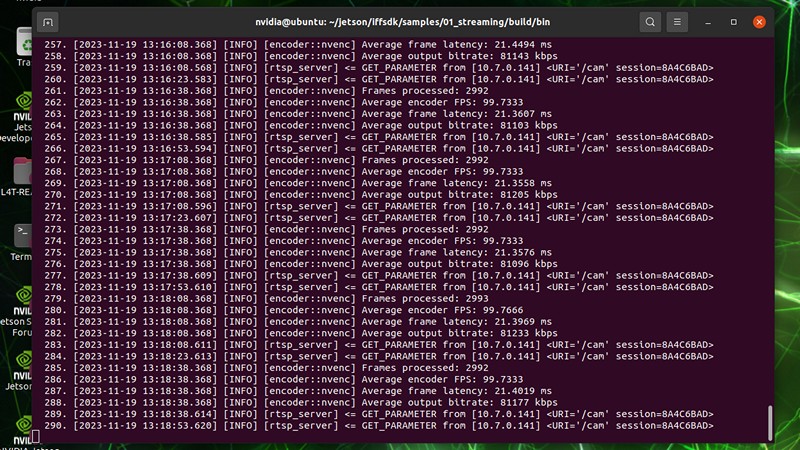
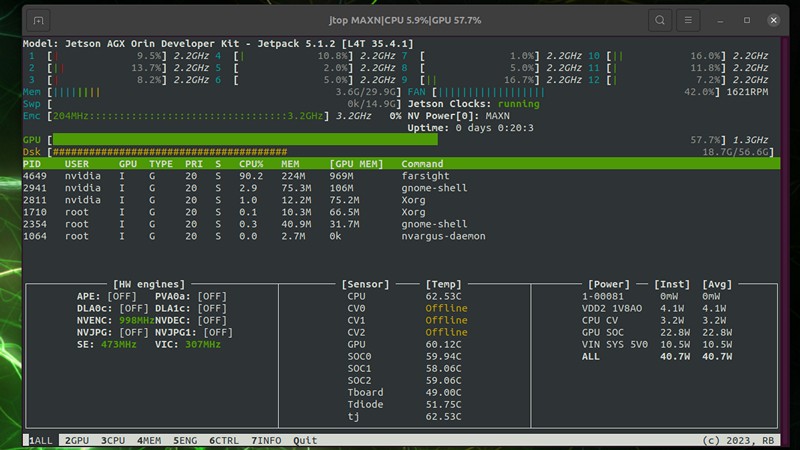
AGX Orin: 4K UHD image @ 12-bit
- Image processing pipeline:
– input image format RAW16
– color pre-processing with high-quality MG demosaic (23×23)
– auto-exposure and auto-white balance
– H.265 encoding with 45 Mbps bitrate
– RTSP streaming over network - Results:
– 4K UHD (3840×2160 ROI) image @ 12-bit @ 120 FPS
– processing latency on AGX Orin: 22 ms
– AGX Orin GPU avg. load: 70%
– full G2G latency: 55 ms
See below Orin and laptop screenshots for this case.

Orin NX: Full HD image @ 8-bit
- Image processing pipeline:
– input image format RAW8
– color pre-processing with fast HQLI demosaic (5×5)
– auto-exposure and auto-white balance
– H.265 encoding with 32 Mbps bitrate
– RTSP streaming over network - Results:
– Full HD (1920×1080 ROI) image @ 8-bit @ 180 FPS
– processing latency on Orin NX: 9 ms
– Orin NX GPU avg. load: 33%
– full G2G latency: 20-30 ms
Orin NX: Full HD image @ 12-bit
- Image processing pipeline:
– input image format RAW16
– color pre-processing with high-quality MG demosaic (23×23)
– auto-exposure and auto-white balance
– H.265 encoding with 32 Mbps bitrate
– RTSP streaming over network - Results:
– Full HD (1920×1080 ROI) image @ 12-bit @ 180 FPS
– processing latency on Orin NX: 11 ms
– Orin NX GPU avg. load: 64%
– full G2G latency: 30-40 ms
Orin NX: 4K UHD image @ 8-bit
- Image processing pipeline:
– input image format RAW8
– color pre-processing with fast HQLI demosaic (5×5)
– auto-exposure and auto-white balance
– H.265 encoding with 32 Mbps bitrate
– RTSP streaming over network - Results:
– 4K UHD (3840×2160 ROI) image @ 8-bit @ 96 FPS
– processing latency on Orin NX: 22 ms
– Orin NX GPU avg. load: 40%
– full G2G latency: 55 ms
Orin NX: 4K UHD image @ 12-bit
- Image processing pipeline:
– input image format RAW16
– color pre-processing with high-quality MG demosaic (23×23)
– auto-exposure and auto-white balance
– H.265 encoding with 30 Mbps bitrate
– RTSP streaming over network - Results:
– 4K UHD (3840×2160 ROI) image @ 12-bit @ 60 FPS
– processing latency on Orin NX: 35 ms
– Orin NX GPU avg. load: 75%
– full G2G latency: 80 ms
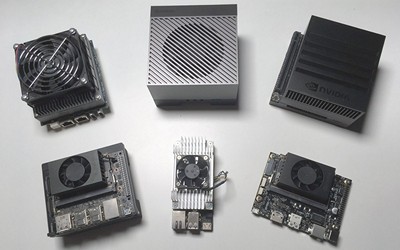
AGX Xavier and Xavier NX series
The predecessor of the Jetson Orin family was the Jetson Xavier series, with which NVIDIA has five different production modules in two form factors (AGX and NX) based on the same architecture.
Our company has carried out several successful machine vision projects with Xavier modules, see some use cases below.
Multi-camera systems with AGX Xavier
for remotely operated machines
Hardware options:
- 2 or 3 or 4 cameras depending on the required configuration:
– PCIe FireFly camera XIMEA MX124CG-SY-FF
– PCIe FireFly camera XIMEA MX031CG-SY-FF
– USB3 camera XIMEA MC031CG-SY
– USB3 camera XIMEA MC051CG-SY - Jetson AGX Xavier 32GB module
- GPU desktop as a receiving station
Image processing pipeline:
- 8/10/12-bit acquisition
- full color pre-processing cycle
- H.264/H.265 encoding, RTSP streaming
Operating results:
- Processing up to 1 GPixel per second in total
- From 20 to 40 ms Xavier processing latency for each camera
WebRTC system with Xavier NX
for streaming images from a MV camera to a client browser
Hardware:
- XIMEA MX031CG-SY-X2G2 camera with 3.1 MPixel resolution and PCIe interface
- Jetson Xavier NX 16GB module
- Auvedia carrier board
Image processing pipeline:
- full frame 12-bit image acquisition
- color pre-processing on GPU
– including DFPD (11×11) quality demosaic - automatic control of exposure time and white balance
- H.265 encoding and streaming using WebRTC protocol to show images in the client web browser
- HTTP interface to remotely control acquisition and processing parameters at runtime
Operating results: 2058 x 1544 @ 60 FPS via browser


Edge multi-sensor system with AGX Xavier
for medical applications
System hardware:
- MIPI sensor array (32x 24 MPixel) placed on a specially designed board connected to the carrier
- AGX Xavier 64GB with ConnectTech Rogue AGX101 carrier board
Software application:
- custom image processing pipeline
- image transfer to the host computer
- acquisition, processing, laser light control
- API for remote control
Operating results:
- simultaneous image acquisition from selected four sensors
- 5 GB/s total bandwidth
4K stereo MIPI camera based on Xavier NX
for entertainment
System hardware:
- two MIPI camera modules with Sony IMX477 sensor
- NVIDIA Jetson Xavier NX 16GB with Auvidea carrier board
- desktop or laptop as a receiving station
Software configuration:
- IMX477 sensor driver operating in 3840×2160 @ 10-bit @ 60 FPS mode
- crop to get two 1920×2160 images
- color pre-processing of cropped images on GPU
– including DFPD (11×11) quality demosaic - H.265 encoding and RTSP streaming
Operating results:
- 4K stereo side-by-side images: 2x 1920×2160 @ 60 FPS
Jetson TX2 / TX2i / TX2 NX modules
NVIDIA launched its Jetson TX2 in 2017; before that, the TX1 was started in 2015. The TX2 series is still popular in the market, although new projects tend to focus on more modern NVIDIA architectures.
MRTech has completed many machine vision projects based on TX1/TX2 modules and these solutions, developed technologies, and experience gained in their implementation allowed us to launch our IFF SDK in early 2022.
Some examples of our solutions with different modifications of TX2 are given below.

High-resolution camera with TX2
for embedded application
System hardware:
- PCIe XIMEA camera MX500CG-CM-X4G2 (48 MP)
- industrial Jetson TX2i module with CT Elroy carrier
Customized processing pipeline:
- 8/10/12 acquisition
- RAW processing
- custom color pre-processing
– including demosaic of varying quality and performance - H.265 encoding
- RTSP multi streaming
Processing results: 47.5 MP, 7920 x 6004 @ 5 FPS
Two camera-headset with TX2
for medical equipment
System hardware:
- Two USB3 subminiature MV cameras XIMEA MU181CR-ON
Jetson TX2 module with Auvidea J121 carrier board - desktop or laptop as a receiving station
Image processing pipeline:
- image acquisition from two cameras with 2×2 binning
- color pre-processing with DFPD (11×11) quality demosaic
- H.265 encoding
- recording of compressed images
- RTSP streaming
- manual and HTTP remote control interfaces
Operating results: 2x 4.5M 2448×1840 @ 30 FPS



Multi-camera systems with TX2
for drones
MRTech has participated in the development of several vision systems for drones, where we were responsible for delivering camera images to the user’s application on the ground. In our experience, the Jetson TX2 resources allow it to be used with up to three cameras of different resolutions. A typical example of such a camera configuration is two Full HD cameras (2x 1920×1080 @ 30 FPS) and one WQHD camera (2560×1440 @ 30 FPS) working simultaneously.